Robot arm for greater accuracy
guidoo: robotic assistance for fast and precise biopsies
Needle-based procedures through the skin, such as biopsies of internal organs, not only require a great deal of skill and experience, but they also take time to perform. Fraunhofer IPA Mannheim, together with BEC GmbH from Pfullingen, is developing a robotic surgical assistance system that supports the correct positioning and angulation of a needle with the help of a guide sleeve. This significantly speeds up the procedure while maintaining precision.
"The scarcest resource doctors have is time," says engineer Johannes Horsch, referring to current issues in medical care. Horsch is head of the Intelligent Assistance Systems and Medical Robotics group in the Clinical Health Technologies department at the Fraunhofer Institute for Manufacturing Engineering and Automation IPA in Mannheim, and has been working intensively for years to improve this situation. "If we can save time by using intelligent assistance – in this case robots – while maintaining the same quality, this will benefit patients as well as clinics ." More patients can be treated in the same amount of time, and with costs of 40 to 60 euros per operating minute, this significantly improves the cost efficiency of a given procedure.
guidoo guides the biopsy needle to the target
 Johannes Horsch (left) and Armin Schäfer (centre) from the Fraunhofer IPA in Mannheim are developing the robotic surgical assistance system known as guidoo together with Andreas Rothfuss (right) from BEC GmbH. © Fraunhofer IPA
Johannes Horsch (left) and Armin Schäfer (centre) from the Fraunhofer IPA in Mannheim are developing the robotic surgical assistance system known as guidoo together with Andreas Rothfuss (right) from BEC GmbH. © Fraunhofer IPAA biopsy of an internal organ, i.e. the removal of small amounts of tissue for further examination, is an important but until now very time-consuming medical diagnostic procedure. If done with a needle through the skin, the professionals who perform the procedure need to be highly skilled and experienced to precisely hit the target structure in the body and cause as little damage as possible to the surrounding tissue. Despite support from imaging techniques, it can take 30 to 45 minutes to position the needle correctly. If several samples are taken, the procedure is prolonged accordingly.
As part of the Mannheim research campus M2OLIE (Mannheim Molecular Intervention Environment), aimed at establishing a patient-centred and time-optimised infrastructure for innovative tumour therapies, the Fraunhofer IPA started developing a new assistance system in 2013 at the suggestion of the clinic: "We want users to be able to perform a biopsy with the guidoo robot arm with the same level of precision as a highly experienced operator but much faster," explains Horsch. The next few years were spent developing an initial device in close cooperation with physicians at the Mannheim University Medical Center. The device supports the positioning and angulation of the biopsy needle by precisely placing a guide sleeve at the correct angle over the planned insertion site. By 2017, initial user studies on phantoms (artificial body parts) showed that inexperienced medical students could achieve very high accuracy in 6.5 minutes on average after ten robot-assisted interventions. These results prompted the commercialisation of the device.
Interdisciplinary cooperation between research, industry and clinic
Since 2018, the Fraunhofer IPA has been working with the automation company BEC GmbH from Pfullingen to test the guidoo in clinical practice and develop a market-ready device. The certified medical device manufacturer has many years of experience with positioning systems in the field of medical technology. "The innovative value of guidoo is clearly the improved temporal efficiency rather than increased accuracy compared to humans," explains Andreas Rothfuss. He has been involved in the project since the beginning; first as a Fraunhofer IPA employee and now as the person responsible for development and approval at BEC. "guidoo places and angulates the needle, the part of the procedure where we humans are very slow." "However, the doctor still has overall control of the treatment and decides how deep the needle is inserted. guidoo only assists," adds Armin Schäfer, who is in charge of robot-assisted interventions at Fraunhofer IPA.
In practice, guidoo works as follows: the robot arm is pushed on its mobile base over to the operating table where the patient is. A 3D image is created using cone beam computed tomography (CBCT) to make the target structures identifiable. As the robot hand is also in the imaging area, the robot and the imaging can be automatically calibrated using integrated markers. The operator then defines the biopsy point and the desired insertion site, whereupon guidoo calculates the best access route and places the needle guide, a procedure that only takes a few minutes. The person carrying out the procedure is then guided by the sleeve to insert the needle, after which he or she checks the position with another CBCT and removes the tissue sample.
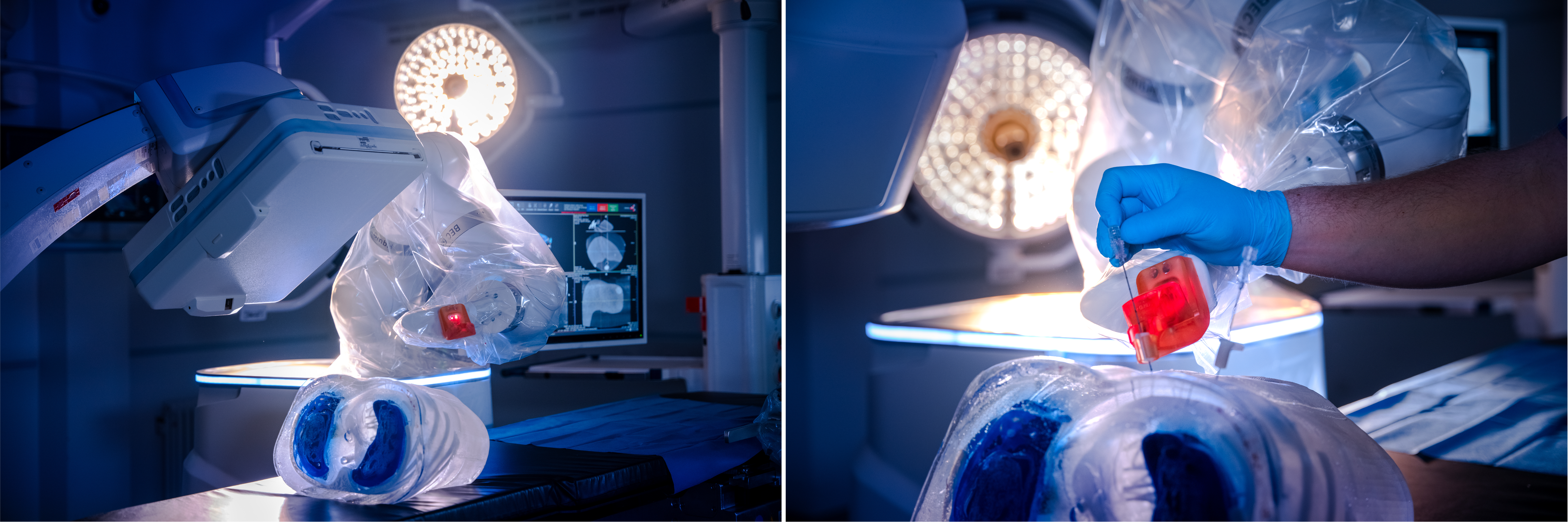 The ‘hand’ (in red) of guidoo, the robotic arm, places guide sleeves under CBCT control (device at the front left) in the correct position and at the correct angle through which a medical expert can then insert the biopsy needle.
© Fraunhofer IPA
The ‘hand’ (in red) of guidoo, the robotic arm, places guide sleeves under CBCT control (device at the front left) in the correct position and at the correct angle through which a medical expert can then insert the biopsy needle.
© Fraunhofer IPA
In early 2021, the second clinical partner, Kantonsspital Baden in Switzerland, ran safety and performance tests on guidoo, successfully conducting the first in vivo trials on animals in a surgical training centre in Strasbourg. The knowledge gained from this is currently being incorporated into the control system. Technical documentation is also being prepared and, based on this, guidoo is expected to be given approval as a class IIB medical device by autumn 2022, so first use on patients is likely to happen this year.
guidoo offers many advantages
guidoo significantly accelerates the biopsy process and thus supports the rapid clarification of a suspected tumour. A great deal of time can be saved, especially when several samples have to be taken due to metastases. According to Rothfuss, the robotic assistance system also means that less experienced people can perform the procedures precisely and quickly so they can therefore be offered in more institutions. Furthermore, guidoo improves patient safety and tolerability because improved targeting accuracy means the surrounding tissue is less likely to be damaged. The length of time staff and patients are exposed to radiation during the procedure is also significantly reduced. Hospitals benefit financially from the robot arm, as interventions become more cost-efficient and can be better planned.
However, biopsy support is only one of guidoo’s possible applications. After approval, further applications are conceivable in procedures that also require long, thin instruments, such as surgical drills, or thermoablation (tissue destruction by heat).