Robotics in medicine
Copied from the pangolin: innovative flexible miniature robot for minimally invasive applications
Wireless miniature robots that can penetrate hard-to-reach areas of the body for the purpose of medical treatment are currently still a vision of the future. Researchers at the Max Planck Institute for Intelligent Systems in Stuttgart have now constructed the first flexible prototype modelled on the pangolin, which can generate heat and stop bleeding, kill tumour cells or release "cargo" in the model system.
The use of minimally invasive techniques for examinations and operations not only reduces pain, but also the risk of inflammation. In addition, patients recover more quickly. Developed in the late 1980s, this procedure only requires incisions a few millimetres in length. And avoids the need for major open operations. Camera optics and instruments are inserted inside the body through small access points or natural body openings such as the mouth, anus, vagina and urethra.
Pangolin inspires researchers
 Ren Hao Soon and his colleagues have laid the initial foundations for a flexible soft robot that could one day be used to reach and perform minimally invasive medical treatment in areas of the body that are difficult to access. © MPI for Intelligent Systems
Ren Hao Soon and his colleagues have laid the initial foundations for a flexible soft robot that could one day be used to reach and perform minimally invasive medical treatment in areas of the body that are difficult to access. © MPI for Intelligent Systems"But some organs, such as the long, highly convoluted small intestine, are difficult to access using this method. We are therefore working to develop wireless miniature robots for the medical field," explains Ren Hao Soon, PhD student in the Department of Physical Intelligence headed up by Prof. Dr. Metin Sitti at the Stuttgart-based Max Planck Institute for Intelligent Systems. In June 2023, he and his colleagues presented a small, flexible soft robot containing both soft and hard components in the renowned journal Nature Communications.1) Ren Hao Soon explains: "We have disproved the previous belief that the robot cannot contain anything but soft elements. Combining soft elements with solid materials opens up totally new possibilities."
A pangolin, also referred as a living pinecone, was used as model for the innovative prototype. Its body is covered with hard keratin scales. Despite its hard exterior, the animal is very agile and can curl up in an immobile, hard ball when threatened. This is made possible by the special arrangement of the overlapping scales, which are directly connected to the soft skin layer. Based on this structure, the researchers constructed a 1 x 2 cm plate made of a soft layer of PDMS (polydimethylsiloxane), covered with a layer of overlapping aluminium elements. The miniature robot can move without damaging tissue and perform its task when unfolded.
Intelligent design enables additional functions
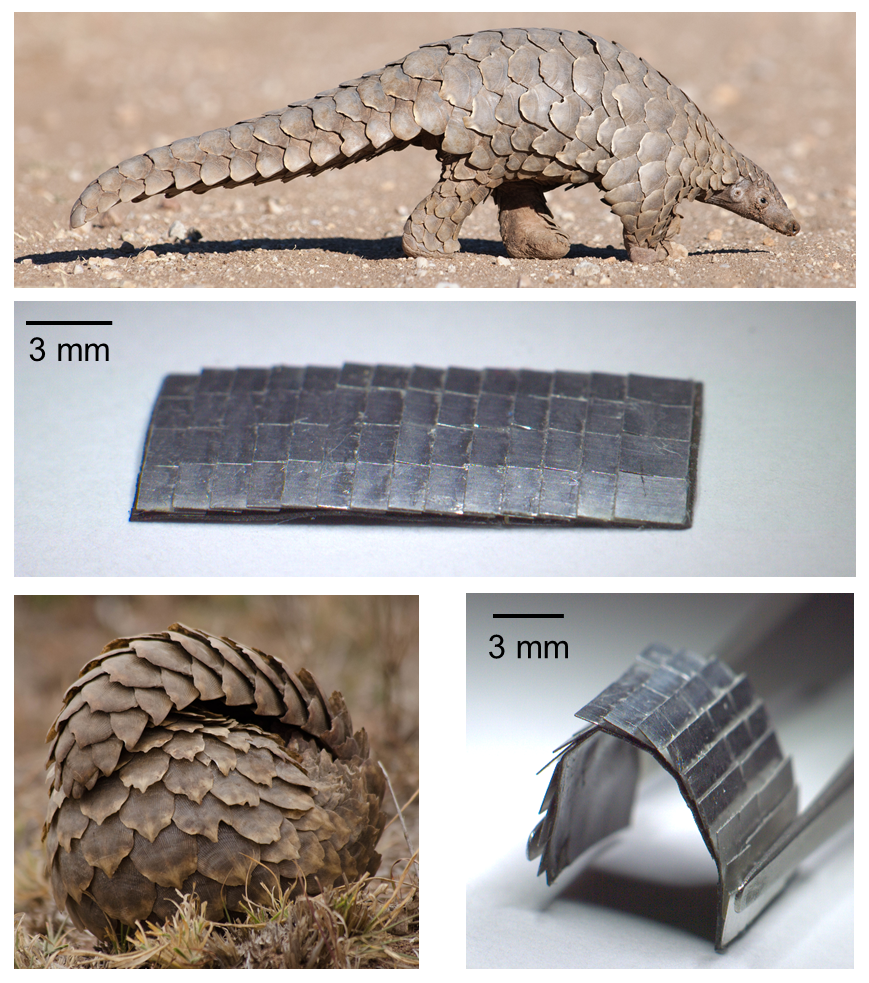 Based on the pangolin, which has armour consisting of individual overlapping hard keratin scales attached to the body, the new robot has a soft underside with a layer of overlapping, solid metal elements. This structure enables a high degree of flexibility. Source: https://doi.org/10.1038/s41467-023-38689-x, Ren Hao Soon, CC BY 4.0 (https://creativecommons.org/licenses/by/4.0/)
Based on the pangolin, which has armour consisting of individual overlapping hard keratin scales attached to the body, the new robot has a soft underside with a layer of overlapping, solid metal elements. This structure enables a high degree of flexibility. Source: https://doi.org/10.1038/s41467-023-38689-x, Ren Hao Soon, CC BY 4.0 (https://creativecommons.org/licenses/by/4.0/)"Before I started my doctoral thesis, soft robotics research focussed mainly on how to move small soft robots," says Soon, describing the initial situation. "But that's only half the problem. Movement needs to be linked to a function at the target location, otherwise the robot is useless. Our design even enables different functions without restricting mobility."
The small device can be controlled with the help of a magnetic field, as magnetic nanoparticles are incorporated into the soft PDMS layer. The scientist explains: "Magnetic fields are very safe for the human organism and are used in magnetic resonance imaging, for example. They enable us to control the robot non-invasively and allow targeted movements." At low frequencies, the small plate rolls up and can be directed to the target location. After the magnetic field is switched off, the plate unfolds."
If, however, a field with higher frequencies is applied - in this case radio frequencies (RF) of 338 kHz - this heats the metallic elements. "We opted for aluminium because it has good electrical conductivity at a low weight. It is also more biocompatible than copper, for example." The aluminium elements can be heated to over 70 °C in less than 30 seconds. Two different physical effects can therefore be achieved with just one type of stimulus.
Use heat to stop bleeding, destroy tumours or release "cargo” in a targeted manner
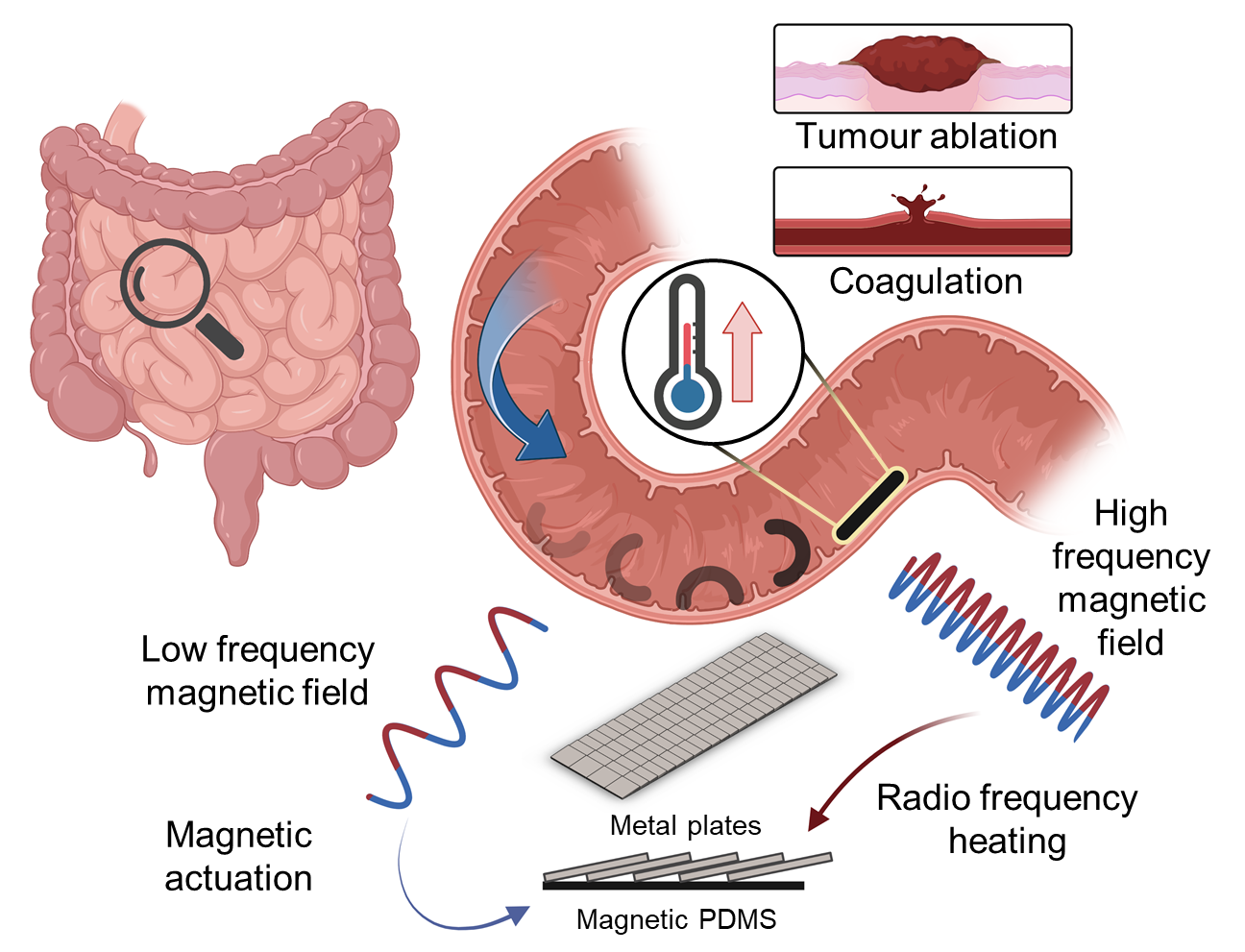 Schematic representation of how the wireless mini robot works in the small intestine. The device can be controlled using a low-frequency magnetic field; high frequencies cause the small aluminium plates to heat up, which can stop bleeding or destroy tumours, for example. Source: https://doi.org/10.1038/s41467-023-38689-x, Ren Hao Soon, CC BY 4.0 (https://creativecommons.org/licenses/by/4.0/)
Schematic representation of how the wireless mini robot works in the small intestine. The device can be controlled using a low-frequency magnetic field; high frequencies cause the small aluminium plates to heat up, which can stop bleeding or destroy tumours, for example. Source: https://doi.org/10.1038/s41467-023-38689-x, Ren Hao Soon, CC BY 4.0 (https://creativecommons.org/licenses/by/4.0/)In their publication, the researchers demonstrate possible medical applications for the miniature robot. These included using an isolated pig stomach to simulate a vascular haemorrhage that could be stopped by administering an RF pulse for three seconds. The hyperthermia treatment of tumours, i.e. the overheating of cancer cells, is another potential field of application. After introducing tumour tissue into an isolated small pig intestine, the authors successfully navigated the robot to the tumour and destroyed the cells by heating them to 60 °C for five minutes.
Another interesting application is the transport and selective release of drugs. For this purpose, the "cargo" is fixed with beeswax onto an aluminium strip inside the small plate. When an RF field is applied, the strip heats up and the wax melts, releasing its cargo. As the time it takes for the wax to melt depends on the thickness of the aluminium piece underneath, different "cargo" can be attached to pieces of different thicknesses and released by the robot one after the other. "In this way, we achieve different reactions to the same magnetic field," Soon explains.
Due to its small size, the soft robot fits easily into a standard gelatine capsule and could simply be swallowed to perform its task in the digestive tract, for example.
 The miniature robot fits into a standard gelatine capsule. Source: https://doi.org/10.1038/s41467-023-38689-x, Ren Hao Soon, CC BY 4.0 (https://creativecommons.org/licenses/by/4.0/)
The miniature robot fits into a standard gelatine capsule. Source: https://doi.org/10.1038/s41467-023-38689-x, Ren Hao Soon, CC BY 4.0 (https://creativecommons.org/licenses/by/4.0/)Adaptation to medical requirements planned
However, there is still a long way to go before it can be used in hospitals. "We have found a technical solution, but we don't know the specific problems that doctors face. In the next stage of development, we want to work closely with doctors, as each application requires a specific robot design," says the mechanical engineer, describing the planned approach. As the researchers assemble the entire device themselves by hand, building different dimensions or geometries is not a problem. Visualisation will also be improved with the help of ultrasound. This innovative development from Stuttgart has laid the foundations for one day reaching areas of the body previously difficult to access in a minimally invasive manner and, once there, performing gentle and safe medical treatment.