Robotik in der Medizin
Vom Schuppentier abgeschaut: Neuartiger flexibler Miniroboter für minimalinvasive Anwendungen
Kabellose Miniroboter, die zum Zweck medizinischer Behandlungen in schwer zugängliche Körperregionen vordringen können, sind derzeit noch eine Zukunftsvision. Forschende des Max-Planck-Instituts für Intelligente Systeme in Stuttgart haben jetzt nach dem Vorbild des Schuppentiers einen ersten flexiblen Prototyp konstruiert, der Wärme entwickeln und im Modellsystem Blutungen stillen, Tumorzellen abtöten oder „Ladung“ freisetzen kann.
Der Einsatz minimalinvasiver Techniken bei Untersuchungen und Operationen reduziert nicht nur Schmerzen, sondern auch die Entzündungsgefahr. Zudem genesen die Betroffenen schneller, denn dieses Ende der 1980er Jahre entwickelte Verfahren benötigt nur wenige Millimeter lange Schnitte, sodass große offene Operationen vermieden werden können. Durch die kleinen Zugänge oder durch natürliche Körperöffnungen wie Mund, After, Scheide sowie Harnröhre lassen sich dann Kameraoptik und Instrumente ins Innere des Körpers einführen.
Schuppentier inspiriert Forschende
 Ren Hao Soon und seine Kolleginnen und Kollegen haben erste Grundlagen für einen flexiblen Softroboter geschaffen, mit dem eines Tages auch schwer zugängliche Körperregionen minimalinvasiv erreicht und medizinisch versorgt werden könnten. © MPI für Intelligente Systeme
Ren Hao Soon und seine Kolleginnen und Kollegen haben erste Grundlagen für einen flexiblen Softroboter geschaffen, mit dem eines Tages auch schwer zugängliche Körperregionen minimalinvasiv erreicht und medizinisch versorgt werden könnten. © MPI für Intelligente Systeme„Aber einige Organe, wie beispielsweise der lange, stark gewundene Dünndarm, sind mit dieser Methode nur schwer zugänglich. Wir arbeiten deshalb an der Entwicklung von kabellosen Minirobotern für den medizinischen Bereich“, erläutert Ren Hao Soon, Doktorand in der von Prof. Dr. Metin Sitti geleiteten Abteilung für Physische Intelligenz am Max-Planck-Institut für Intelligente Systeme in Stuttgart. Im Juni 2023 stellte er zusammen mit seinen Kolleginnen und Kollegen im renommierten Fachjournal Nature Communications einen kleinen flexiblen Softroboter vor, der sowohl weiche als auch harte Bauteile enthält.1) Der Erstautor verdeutlicht: „Wir haben die bisherige Annahme widerlegt, dass Roboter für medizinische Anwendungen ausschließlich weiche Elemente enthalten müssen. Die Kombination mit festen Materialien eröffnet völlig neue Möglichkeiten.“
Vorbild für den innovativen Prototyp war das Schuppentier, auch Tannenzapfentier oder Pangolin genannt, dessen Körper mit festen Keratinschuppen bedeckt ist. Trotz des harten Äußeren ist es sehr beweglich und kann sich bei Bedrohung zu einer Kugel zusammenrollen. Dies ist durch die besondere Anordnung der Schuppen möglich, die direkt mit der weichen Hautschicht verbunden sind und sich überlappen. In Anlehnung an diesen Aufbau konstruierten die Forschenden ein 1 x 2 cm großes Plättchen aus einer weichen Schicht aus PDMS (Polydimethylsiloxan), auf der sich eine Lage aus überlappenden Aluminium-Elementen befindet. Der Miniroboter kann sich rollend fortbewegen, ohne Gewebe zu verletzen und im entfalteten Zustand seine Aufgabe erfüllen.
Intelligentes Design ermöglicht zusätzliche Funktionen
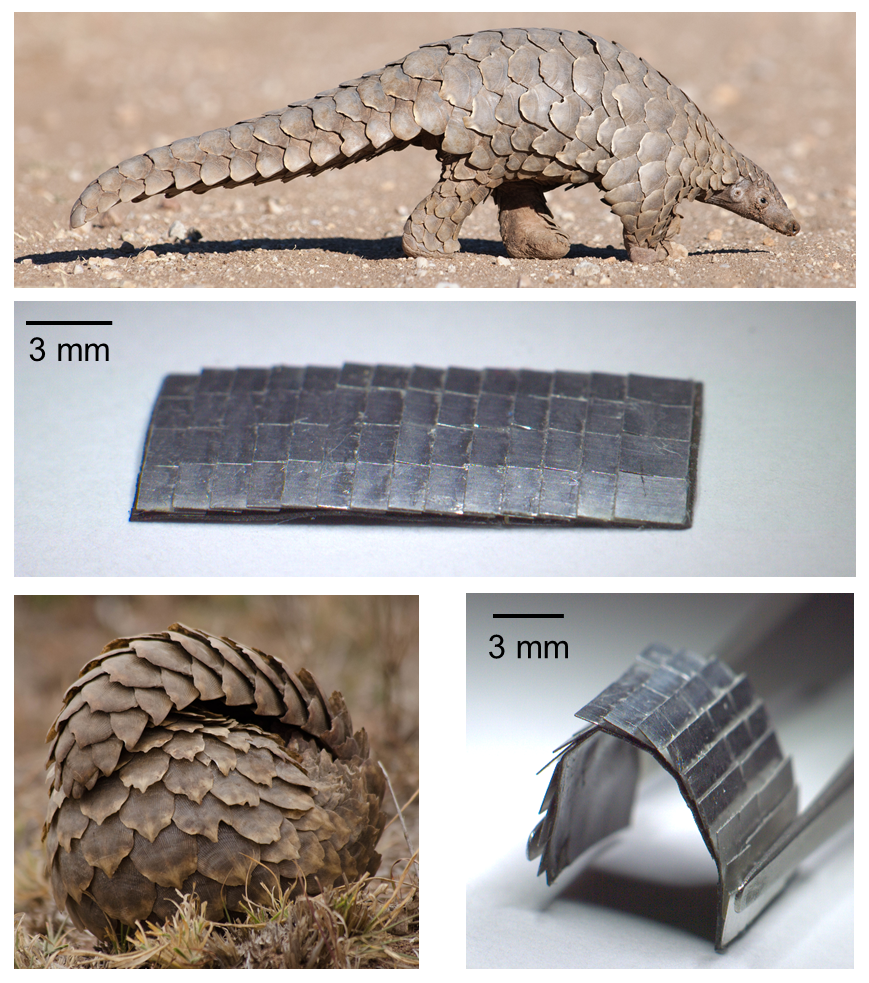 In Anlehnung an das Schuppentier besitzt der neuartige Roboter eine weiche Unterseite, auf der sich eine Schicht aus überlappenden, festen Metallplättchen befindet. Dieser Aufbau ermöglicht eine hohe Flexibilität.
In Anlehnung an das Schuppentier besitzt der neuartige Roboter eine weiche Unterseite, auf der sich eine Schicht aus überlappenden, festen Metallplättchen befindet. Dieser Aufbau ermöglicht eine hohe Flexibilität.
Quelle: https://doi.org/10.1038/s41467-023-38689-x, Ren Hao Soon, CC BY 4.0 (https://creativecommons.org/licenses/by/4.0/)„Bevor ich meine Doktorarbeit begann, konzentrierte sich die Softrobotik-Forschung hauptsächlich darauf, wie kleine weiche Roboter bewegt werden können“, beschreibt Soon die Ausgangssituation. „Aber das ist nur das halbe Problem. Die Bewegung muss mit einer Funktion am Zielort verknüpft sein, sonst ist der Roboter nutzlos. Unser Design ermöglicht sogar unterschiedliche Funktionen, ohne dass die Mobilität eingeschränkt ist.“
Steuern lässt sich das kleine Gerät mit Hilfe eines Magnetfeldes, da in die weiche PDMS-Schicht magnetische Nanopartikel eingearbeitet sind. Der Wissenschaftler erklärt: „Magnetfelder sind sehr sicher für den menschlichen Organismus und werden beispielsweise bei der Magnetresonanztomografie zur Bildgebung eingesetzt. Sie ermöglichen uns eine nichtinvasive Kontrolle über den Roboter und erlauben zielgerichtete Bewegungen.“ Bei niedrigen Frequenzen rollt sich das Plättchen zusammen und kann zum Zielort dirigiert werden. Nach Abschalten des Magnetfeldes entfaltet es sich.
Legt man hingegen ein Feld mit höheren Frequenzen an - in diesem Fall Radiofrequenzen (RF) von 338 kHz - führt dies zur Erwärmung der metallischen Elemente. „Wir haben uns für Aluminium entschieden, da es bei geringem Gewicht eine gute elektrische Leitfähigkeit besitzt. Außerdem ist die Biokompatibilität besser als beispielsweise von Kupfer.“ Innerhalb von weniger als 30 Sekunden können die Schuppen so auf mehr als 70 °C erwärmt werden. Mit nur einer Art von Stimulus lassen sich also zwei verschiedene physikalische Effekte erzielen.
Durch Hitze Blutungen stoppen, Tumore zerstören oder „Ladung“ gezielt freisetzen
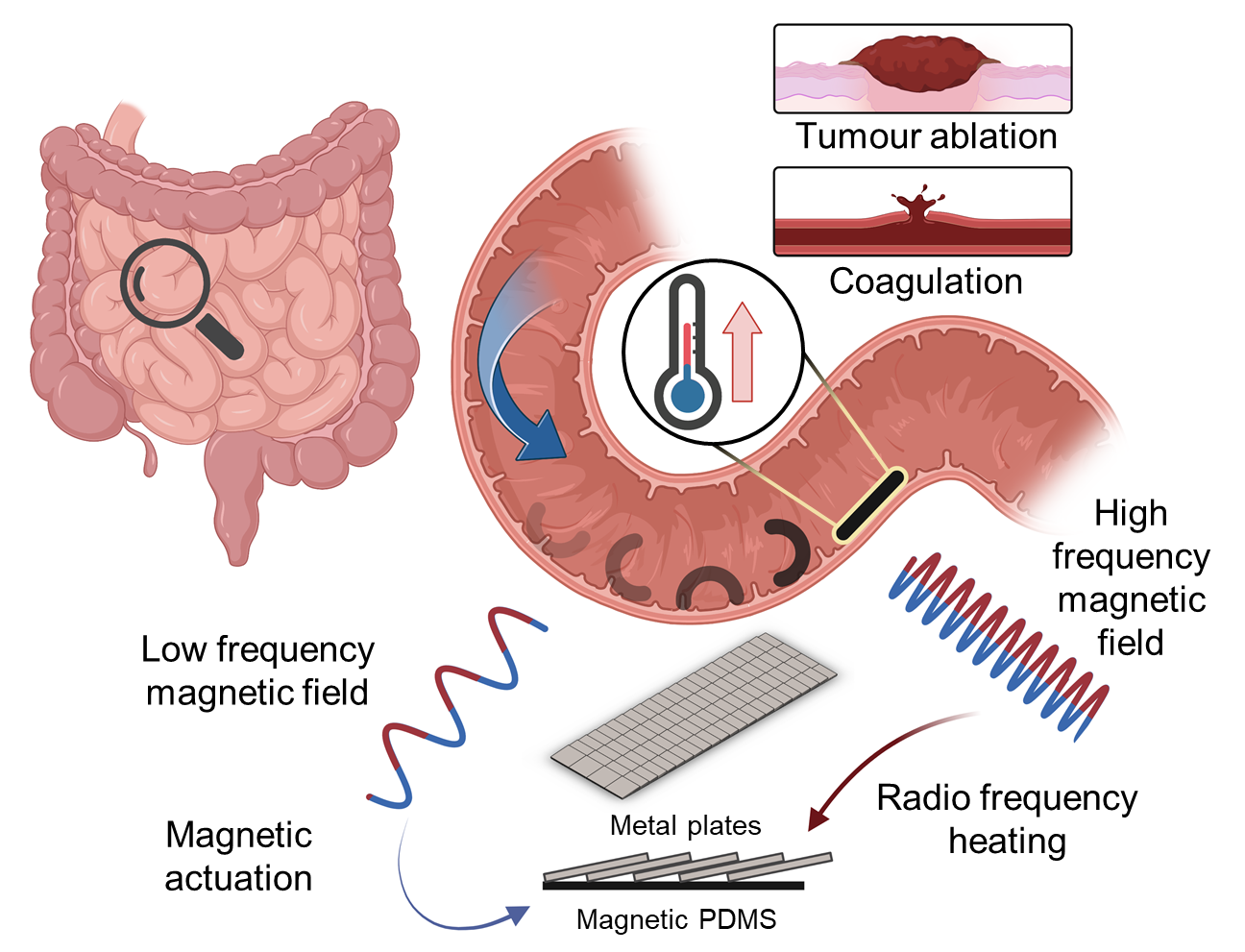 Schematische Darstellung der Funktionsweise des kabellosen Miniroboters im Dünndarm. Mit Hilfe eines niedrigfrequenten Magnetfeldes kann das Gerät gesteuert werden, hohe Frequenzen bewirken eine Erhitzung der Aluminiumplättchen, wodurch beispielsweise Blutungen gestoppt oder Tumore zerstört werden können.Quelle: https://doi.org/10.1038/s41467-023-38689-x, Ren Hao Soon, CC BY 4.0 (https://creativecommons.org/licenses/by/4.0/)
Schematische Darstellung der Funktionsweise des kabellosen Miniroboters im Dünndarm. Mit Hilfe eines niedrigfrequenten Magnetfeldes kann das Gerät gesteuert werden, hohe Frequenzen bewirken eine Erhitzung der Aluminiumplättchen, wodurch beispielsweise Blutungen gestoppt oder Tumore zerstört werden können.Quelle: https://doi.org/10.1038/s41467-023-38689-x, Ren Hao Soon, CC BY 4.0 (https://creativecommons.org/licenses/by/4.0/)In ihrer Publikation demonstrieren die Forschenden mögliche medizinische Einsatzgebiete des Miniroboters. An einem isolierten Schweinemagen simulierten sie beispielsweise eine Gefäßblutung, die sich durch Gabe eines RF-Impulses von drei Sekunden stoppen ließ. Auch die Hyperthermie-Behandlung von Tumoren, also die Überhitzung der Krebszellen, könnte ein Einsatzfeld sein. Nach Einbringen von Tumorgewebe in einen isolierten Schweinedünndarm gelang es den Autorinnen und Autoren, den Roboter zum Tumor zu navigieren und die Zellen durch fünfminütiges Erhitzen auf 60 °C zu zerstören.
Eine weitere interessante Anwendung ist der Transport und die selektive Freisetzung von Medikamenten. Zu diesem Zweck wurde die „Ladung“ mit Bienenwachs auf einem Aluminiumstreifen an der Innenseite des Plättchens fixiert. Bei Anlegen eines RF-Feldes erhitzt sich der Streifen, und das Wachs schmilzt, sodass die Ladung entlassen wird. Da die Zeit bis zum Schmelzen des Wachses von der Dicke des darunterliegenden Aluminiumstückes abhängt, können verschiedene „Ladungen“ an unterschiedlich dicken Stücken befestigt und vom Roboter nacheinander freigegeben werden. „Auf diese Art und Weise erreichen wir verschiedene Reaktionen auf dasselbe Magnetfeld,“ führt Soon aus.
Aufgrund seiner geringen Größe passt der Softroboter problemlos in eine Standard-Gelatinekapsel und könnte einfach geschluckt werden, um beispielsweise im Verdauungstrakt seine Aufgabe zu erfüllen.
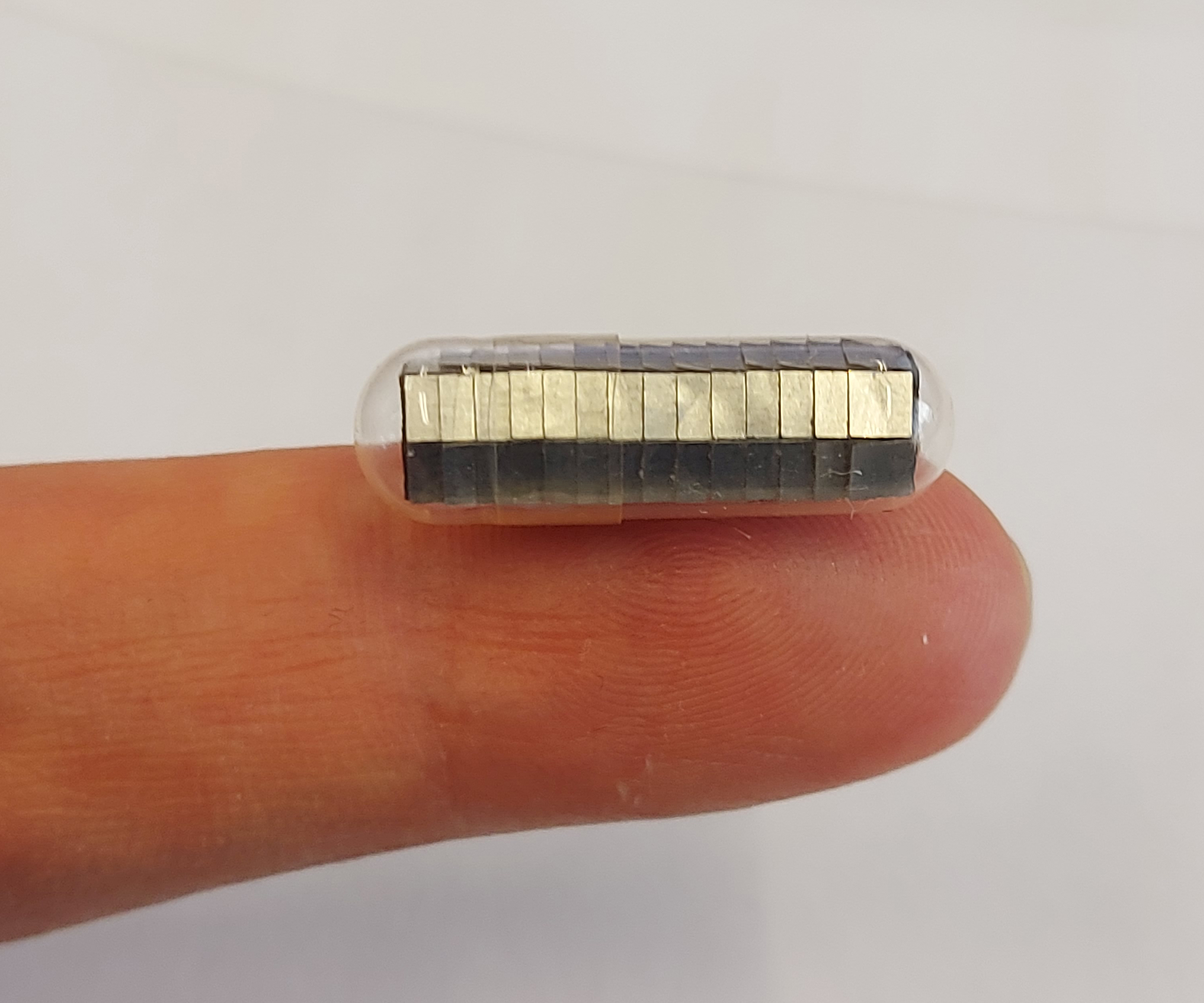 Der Miniaturroboter passt in eine handelsübliche Gelatinekapsel.
Der Miniaturroboter passt in eine handelsübliche Gelatinekapsel.
Quelle: https://doi.org/10.1038/s41467-023-38689-x, Ren Hao Soon, CC BY 4.0 (https://creativecommons.org/licenses/by/4.0/)Adaption an medizinische Anforderungen geplant
Bis zum Einsatz in der Klinik ist es allerdings noch ein weiter Weg. „Wir haben jetzt eine technische Lösung gefunden, kennen aber die konkreten Probleme der Medizinerinnen und Mediziner nicht. Im nächsten Schritt der Entwicklung wollen wir eng mit ihnen zusammenarbeiten, denn jede Anwendung erfordert ein spezifisches Design des Roboters,“ schildert der Maschinenbauingenieur die geplante Vorgehensweise. Da die Forschenden das Gerät in Handarbeit von Grund auf selber zusammenbauen, sind andere Abmessungen oder auch Geometrien problemlos umsetzbar. Des Weiteren soll die Visualisierung mit Hilfe von Ultraschall verbessert werden. Mit der innovativen Entwicklung aus Stuttgart wurden nun erste Grundlagen geschaffen, um eines Tages auch bisher schwer zugängliche Körperbereiche minimalinvasiv zu erreichen und diese schonend und sicher medizinisch zu versorgen.