Nanoroboter als zukünftige minimalinvasive Werkzeuge fürs Auge
Medikamente im Auge an der richtigen Stelle zu platzieren ist außerordentlich schwierig: Beim Tropfen gelangt nur ein kleiner Bruchteil des Wirkstoffs an sein Ziel, und auch per Injektion unterliegt die Verteilung mehr oder weniger dem Zufall. Nun haben Grundlagenforscher des Stuttgarter Max-Planck-Instituts für Intelligente Systeme einen Nanoroboter entwickelt, der in kürzester Zeit gezielt durch das feste Gewebe des Glaskörpers geleitet werden kann und mit Wirkstoffen für Augenerkrankungen beladen werden könnte.
Gut wirksame Therapeutika für Erkrankungen des Auges gibt es schon einige: In Tropfenform wird allerdings die größte Menge des Medikaments vom Lidschlag entfernt, sodass der Wirkstoff entsprechend hoch dosiert sein muss, was wiederum zu Nebenwirkungen führen kann. Und auch per Injektion werden die Wirkstoffmoleküle durch passive Diffusion eher zufällig verteilt. Zudem dauert es relativ lange, bis der Ort der Erkrankung erreicht ist – wenn der Wirkstoff überhaupt ankommt. Dabei wirkt vor allem der Glaskörper, der das Augeninnere ausfüllt, als Barriere für Arzneimittel, die ins hintere Auge, beispielsweise zur Netzhaut (Retina), gelangen sollen.
Nanoroboter steuert erstmals durch den Glaskörper
 Dr. Tian Qiu hat mit seiner Arbeitsgruppe erstmals einen Nanoroboter entwickelt, der den Glaskörper überwinden und bis ins hintere Auge gelangen kann. © T. Qiu, MPI-IS
Dr. Tian Qiu hat mit seiner Arbeitsgruppe erstmals einen Nanoroboter entwickelt, der den Glaskörper überwinden und bis ins hintere Auge gelangen kann. © T. Qiu, MPI-ISUm zukünftig therapeutische Wirkstoffe besser in solch schwer zugängliche Bereiche des menschlichen Körpers bringen zu können, arbeitet man am Max-Planck-Institut für Intelligente Systeme in Stuttgart schon seit Jahren an einer vielversprechenden Lösung des Problems: Roboter von minimalster Größe im Mikro- und Nanometerbereich, die mit Medikamenten beladen und durch Anlegen eines magnetischen Felds zum Ziel geleitet werden können. Allerdings gelang es den Wissenschaftlern bisher lediglich, die Roboter durch Modellflüssigkeiten zu bewegen, aber nicht durch echtes Gewebe wie den Glaskörper des Auges.
„Der Glasköper ist eine gelartige, durchsichtige Substanz, die zwar zu 98 % aus Wasser und nur zu 2 % aus Proteinen besteht, aber durch Bildung einer recht engmaschigen Proteinmatrix ein ziemlich großes Hindernis für Wirkstoffe darstellt, die ins hintere Auge gelangen sollen“, erklärt Dr. Tian Qiu, Wissenschaftler in der Arbeitsgruppe „Micro, Nano, and Molecular Systems“ des Instituts und seit Kurzem auch CyberValley-Forschungsgruppenleiter an der Universität Stuttgart. „Die Retina zu erreichen ist mit den gängigen Techniken derzeit deshalb fast unmöglich.“
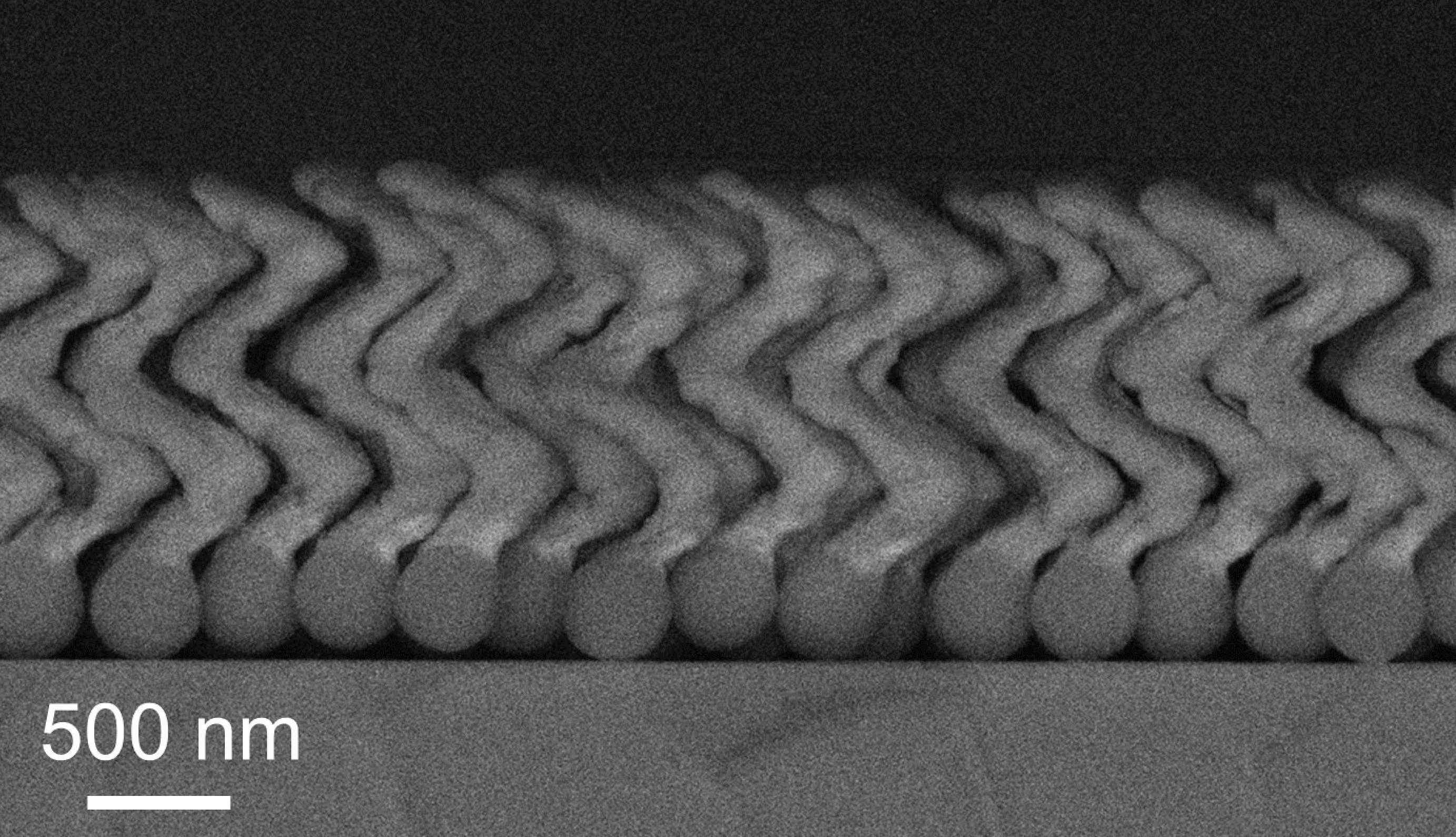 Die Nanopropeller müssen etwa 200-mal kleiner als ein menschliches Haar sein, um durch die engmaschige Proteinmatrix des Glaskörpers steuern zu können. © MPI für Intelligente Systeme
Die Nanopropeller müssen etwa 200-mal kleiner als ein menschliches Haar sein, um durch die engmaschige Proteinmatrix des Glaskörpers steuern zu können. © MPI für Intelligente SystemeAus diesem Grund begannen die Max-Planck-Forscher, einen Nanoroboter zu konstruieren, der den Glaskörper überwinden kann, indem er aktiv bis zur Netzhaut schwimmt. Mit Erfolg: Der Mini-Roboter, den Qiu und seine Kollegen nun entwickelt haben, kann erstmals ganz gezielt durch festes Gewebe bis in den hinteren Augenbereich gesteuert werden. „Die größte Herausforderung war dabei natürlich die poröse Matrix des Glaskörpers“, berichtet der Forscher. „Das ist in etwa so, als ob ein Fisch durchs Netz schwimmen will: Das kann er nur, wenn er klein genug ist. Deshalb war die erste Vorgabe, den Roboter so zu bauen, dass er kleiner ist als die Poren des Glaskörpers – also kleiner als 500 Nanometer. Das ist uns auch gelungen. Aber außerdem musste er sich ja auch aktiv bewegen können. Das haben wir gelöst, indem wir uns die schraubenförmigen Flagellen des Coli-Bakteriums zum Vorbild genommen und damit einen Nanopropeller konstruiert haben. Dieser funktioniert, indem er sich wie ein Korkenzieher bewegt; zum Vorwärtsschwimmen in die eine Richtung, rückwärts in die andere.“
Antihaftbeschichtung von der Kannenpflanze abgeschaut
Um so kleine Gebilde wie die Propeller überhaupt herstellen zu können, haben die Stuttgarter Forscher bereits 2009 ein eigenes Fertigungswerkzeug entwickelt, nanoGLAD (Glancing Angle Deposition System) genannt, das es ermöglicht, Milliarden von 3D-Nanostrukturen innerhalb nur weniger Stunden zu produzieren. Hierdurch entstand seither schon eine Vielzahl kleinster Roboter, die sich allerdings alle bisher nur in Flüssigkeiten, nicht aber in festem Gewebe bewegen konnten. „Obwohl die Nanoroboter eigentlich klein genug sind durchs Gewebe zu schwimmen, hatten wir immer das Problem, dass sie an den Gewebestrukturen festklebten“, berichtet Qiu. „Bei unserem neuesten Ansatz haben wir sie nun mit einer rutschigen Beschichtung versehen, und dieses Mal hat es geklappt: Sie konnten sich ohne Probleme auch durch festere Körperstrukturen wie den Glaskörper bewegen. Das ist ungefähr so wie bei einer Teflonpfanne – auch hier bleibt wegen der Antihaftbeschichtung nichts kleben.“
Aus Teflon besteht die Antihaftbeschichtung der Nanopropeller nicht. Sie setzt sich vielmehr aus zwei biokompatiblen Schichten zusammen: Einer ersten, festen aus Silan-Molekülen, die an die Roboteroberfläche andocken, und einer zweiten, flüssigen, die die Nanopropeller umhüllt und dafür sorgt, dass die Haftung mit dem umliegenden Gewebe so klein wie möglich ausfällt. Die Zusammensetzung der flüssigen Beschichtung haben sich die Experten bei fleischfressenden Kannenpflanzen abgeschaut, bei denen die Blätter durch die rutschige Beschichtung als Fallgruben für Insekten dienen.
Nanopropeller sollen gut verträglich sein
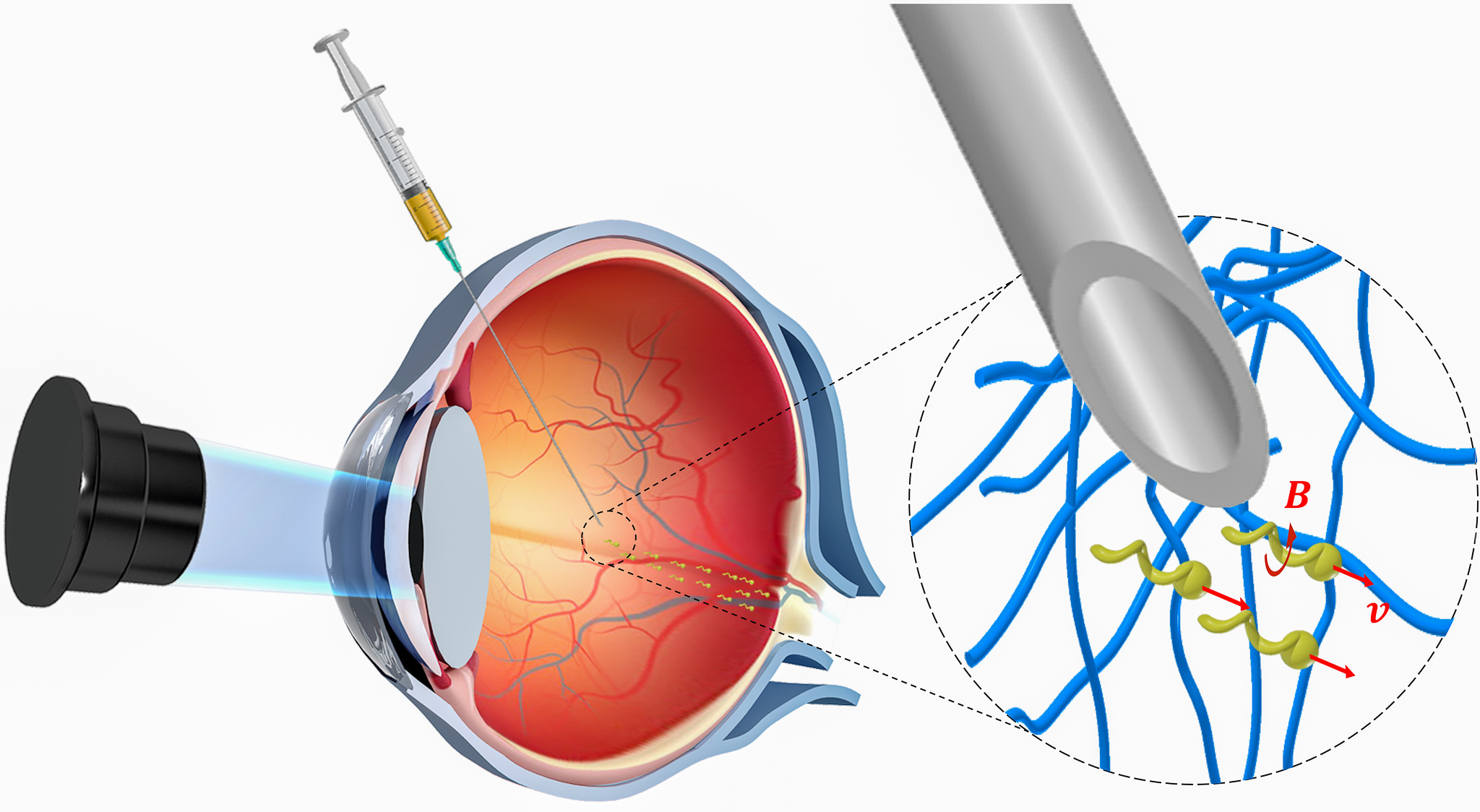 Mit einer dünnen Nadel werden mehrere tausend Nanoroboter ins Auge injiziert. Sie schwimmen anschließend bis zur Netzhaut, wo sie in Zukunft einmal Medikamente abladen könnten. © MPI für Intelligente Systeme
Mit einer dünnen Nadel werden mehrere tausend Nanoroboter ins Auge injiziert. Sie schwimmen anschließend bis zur Netzhaut, wo sie in Zukunft einmal Medikamente abladen könnten. © MPI für Intelligente SystemeHinzu kommt noch ein magnetischer Part, damit die Roboter gezielt gesteuert werden können. Hierfür wird bei der Herstellung Eisen oder Nickel eingebaut. Durch Anlegen eines Magnetfelds können sie dann zum gewünschten Ziel geleitet werden.
Obwohl die Roboter komplett aus anorganischen Materialien bestehen, gehen die Wissenschaftler davon aus, dass sie für menschliche Zellen gut verträglich sind: „Wir denken, dass die Biokompatibilität der Nanopropeller sehr gut ist“, sagt Qiu. „Bei Tests mit Schweineaugen gab es keine Probleme. Die Roboter an sich bestehen aus Silica, das ja ganz ähnlich wie Glas ist und auch als völlig inert gilt. Und für die magnetischen Partikel wurde schon bewiesen, dass sie unschädlich sind. Auch das Magnetfeld, das angelegt wird, ist nur sehr schwach und sollte keine Effekte auf den menschlichen Körper haben. Aber Genaueres werden zukünftige Studien zeigen.“
Roboter sollen zukünftig Medikamente ins Auge bringen
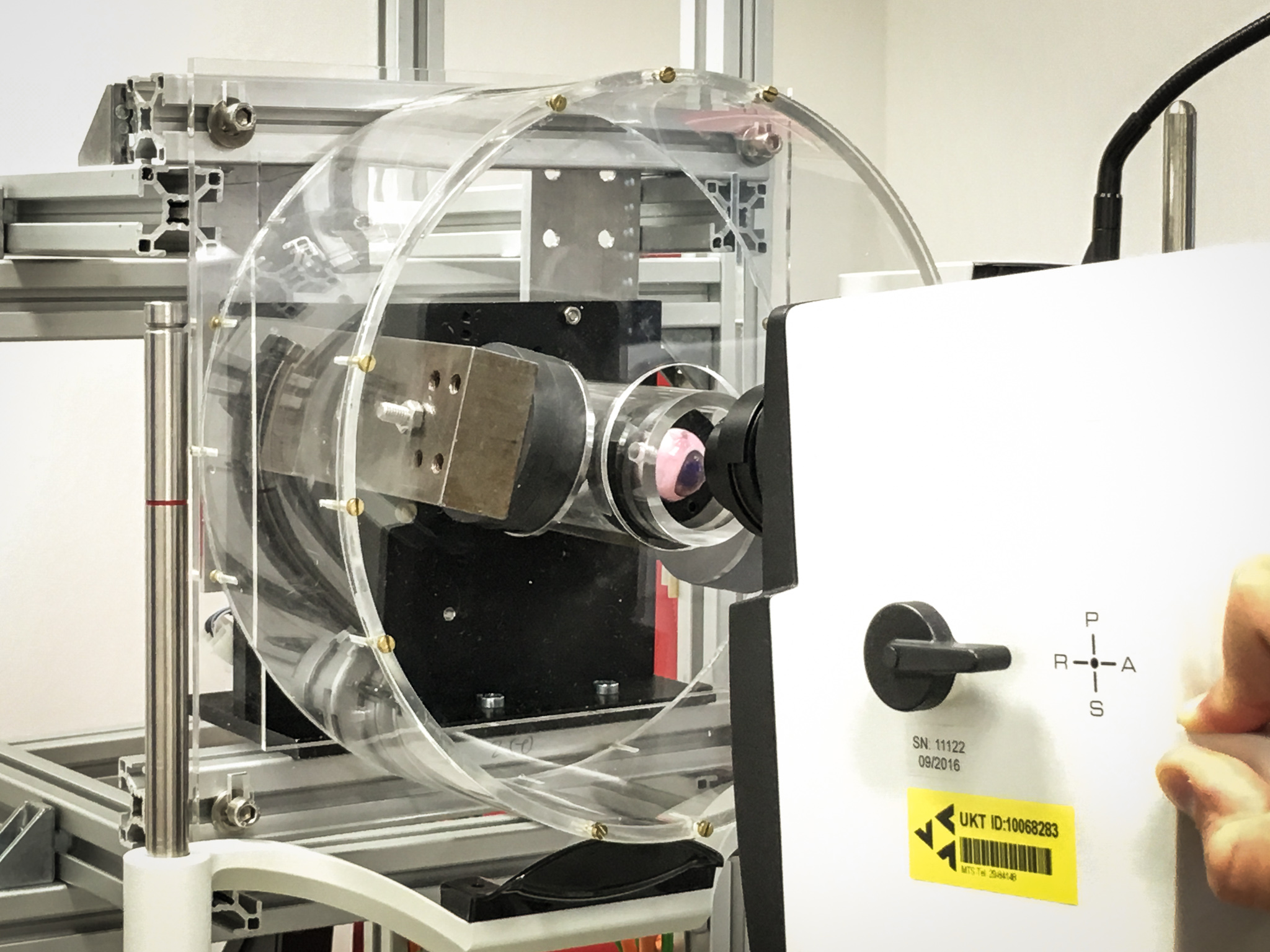 Schweineauge, umgeben von einer Magnetspule: Mithilfe des magnetischen Felds können die Roboter zum gewünschten Ziel gesteuert werden. © MPI für Intelligente Systeme
Schweineauge, umgeben von einer Magnetspule: Mithilfe des magnetischen Felds können die Roboter zum gewünschten Ziel gesteuert werden. © MPI für Intelligente SystemeDass sich die Nanoroboter wirklich gezielt durchs Auge bewegen, konnten die Forscher gemeinsam mit Kollegen der Augenklinik der Universität Tübingen bereits zeigen: Dort wurde die Fortbewegung der schraubenförmigen Mini-Vehikel in einem Schweinauge mithilfe der optischen Kohärenztomografie beobachtet – einer klinischen Methode, wie sie auch in der Diagnostik von Augenerkrankungen verwendet wird. „Hierfür haben wir das Auge nicht seziert – das hätte die Versuchsbedingungen verfälscht – und mehrere tausend Roboter mit einer sehr dünnen Nadel in den Glaskörper injiziert“, so Qiu. „Nach dem Anlegen des magnetischen Feldes konnten wir live verfolgen, wie die Roboter zielgerichtet bis zur Netzhaut schwammen und sich dort sammelten. Dies geschah innerhalb von Minuten und mit einer Genauigkeit von fünf bis sechs Millimetern. Das ist ein Riesenerfolg, wenn man bedenkt, dass herkömmliche Medikamente Stunden bis Tage brauchen, bis sie ihr Ziel erreichen.“
Nun stehen für die Wissenschaftler weitere Experimente an. Denn die Nanopropeller sollen in möglichst nicht allzu ferner Zukunft als Transportmittel für Medikamente dienen. Momentan laufen die Diskussionen, wie die möglichen nächsten Schritte aussehen könnten: „Generell ist der Einsatz für die minimalinvasive Behandlung verschiedenster Krankheiten denkbar, bei denen der Problembereich von dichtem Gewebe umgeben und damit schwer zugänglich ist“, meint der Forscher. „So wie es aber momentan aussieht, werden wir wahrscheinlich damit beginnen, Versuche zur Therapie der altersbedingten Makuladegeneration (AMD) mit den Nanopropellern zu machen.“